Driver Assistance System Providing an Intuitive Perspective View of Vehicle Surrounding
ACCV 2014 Workshops (My Car Has Eyes)
Yen-Ting Yeh, National Taiwan University
Chun-Kang Peng, National Chiao Tung University
Kuan-Wen Chen, National Taiwan University
Yong-Sheng Chen, National Chiao Tung University
Yi-Ping Hung, National Taiwan University
Abstract
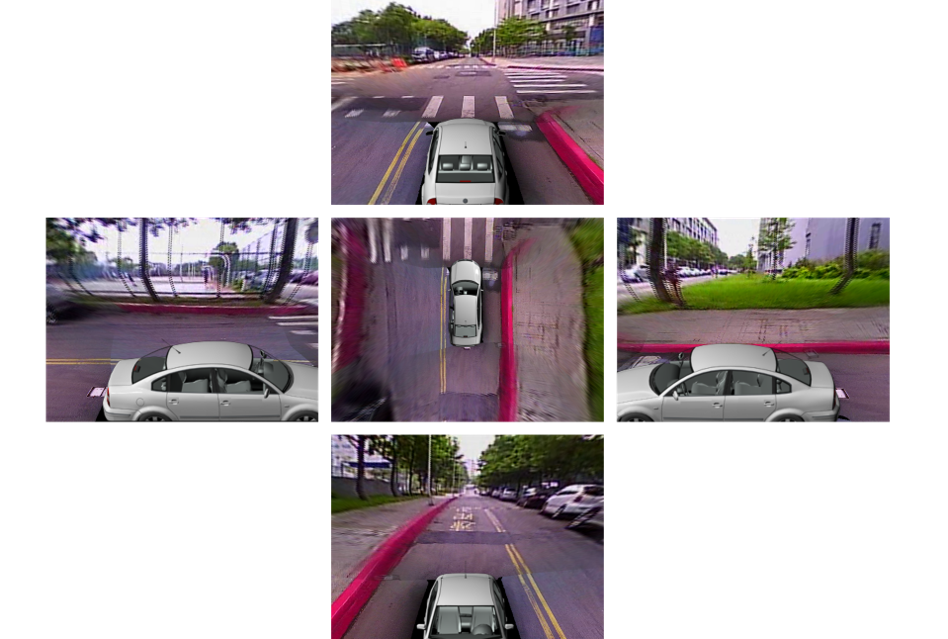
Driver assistance systems can help drivers to avoid car accidents by providing warning signals or visual cues of surrounding situations. Instead of the fixed bird’s-eye view monitoring proposed in many previous works, we developed a real-time vehicle surrounding monitoring system that can assist drivers to perceive the vehicle surrounding situations in third-person viewpoints. Four fisheye cameras were mounted around the vehicle in our system. We developed a simple and accurate fisheye camera calibration method to dewarp the captured images into perspective projection ones. Next, we estimated the intrinsic parameters of each undistorted virtual camera by using planar calibration patterns and then obtain the extrinsic camera parameters by using the global patterns on a ground plane. A new method was proposed to tackle the brightness uniformity problem caused by the various lighting conditions of cameras. Finally, we projected the undistorted images onto a 3D hybrid projection model, stitched these images together, and then rendered the images from a third-person viewpoint selected by the driver. The proposed hybrid projection model is composed of a paraboloid model and a columnar model and can achieve rendering results with less distortion. Compared to conventional around-vehicle monitoring systems, our system can provide adaptive, integrated, and intuitive views of vehicle surroundings in a more realistic way.
Citation Format
Yeh YT., Peng CK., Chen KW., Chen YS., Hung YP. (2015) Driver Assistance System Providing an Intuitive Perspective View of Vehicle Surrounding. In: Jawahar C., Shan S. (eds) Computer Vision - ACCV 2014 Workshops. ACCV 2014. Lecture Notes in Computer Science, vol 9009. Springer, Cham. https://doi.org/10.1007/978-3-319-16631-5_30